- Technology development
Shadowtac
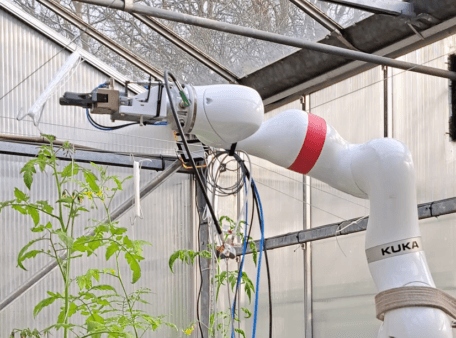
Robot demonstator for a vision-based tactile sensor
Robot demonstator for a vision-based tactile sensor

PartnersRoboHouse, TU Delft
ThemeResearch
StatusOngoing
Robot demonstator for a vision-based tactile sensor
Shadowtac uses computer vision to create tactile feedback, forming a highly aware sensor. This allows it to grip delicate objects without crushing them. Shadowtac has potential for a wide range of uses, but it must be validated with a use case for further development. Is the sensor capable of, for example, harvesting soft cherry tomatoes?
Together with the Tactile Machines Lab at the TU Delft, we have improved mechanical, electronic, and software components of Shadowtac so that the sensor is more easily integrated into a larger system, i.e. a 6 DoF robotic arm. The project is ongoing, and we are working towards a harvesting demo of cherry tomatoes
“We’re making robots feel“
RoboHouse, TU Delft
+31 (0)15 760 1600

Learning by example: Teaching robots a useful skill through teleoperation

Automation of spical-mite card placing for pest control in greenhouses

Unstranding a high-voltage electricity cable. Or folding Aspidistra leaves to create luxurious bouquets. These and six other challenging cases were tackled by student prototypes during the TU Delft Minor Robotics of 2025-2026.

Preparing milk formula for the NICU. Or carrying your produce autonomously from A to B in the greenhouse system. These and six other challenging cases were tackled by student prototypes during the TU Delft Minor Robotics of 2024-2025.

Robotica ontwikkelt zich snel in de moderne agricultuur. Zo ook in de bloementeelt, waar RoboHouse onlangs met Chrysantencollectief Zentoo samenwerkte aan een uitdaging die schuilt tussen de bloemblaadjes.

A 12-week laundry adventure led to a prototype that scans the dirty linen in bulk. Join us as we reflect on another RoboHouse success case.

The pressing issues of labor shortage and the physical strain experienced in industrial cleaning have led to a new partnership, focusing on integrating workers and technology through a human-centered approach.
Plant-lowering automation that requires agility and dexterity